Merry Christmas!
The PCBs came in today, they look great. Of course I will need to make the modifications I mentioned last week. I haven’t received the CH340G chips yet. I will wait until I receive them before I start building.

This week, I wanted to add a slider to set the Sigma Delta output that drives the voltage booster to the web interface. I didn’t know javascript at all so, I went to an online tutorial at Codecademy.com. This tutorial is very basic and even explains the basic concepts of programming in general. I didn’t learn enough to set up a slider, I did learn enough to do some testing.
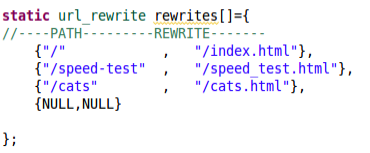
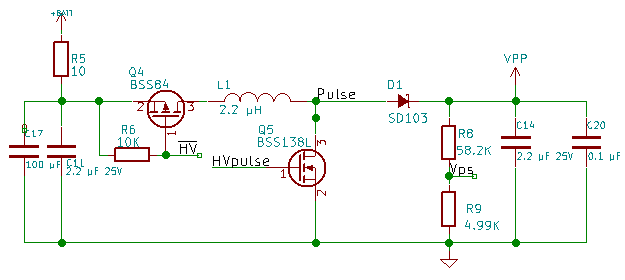
I quickly got the Sigma Delta output working in GPIO12 by copying the necessary code from the test project I was using. I then added a call to config_sigma_delta() from user_init() in user_main.c. I also added a call to set_sigma_delta_duty() from my test code in cgi_relay.c. Of course I added includes to sigma_delta.h in both of those files. I then changed the Sigma Delta output from GPIO12 to GPIO4 to match the HV_pulse line used to run the switched coil.
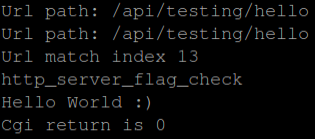
Now if I hit the say Hello button, It changes the Sigma Delta output duty cycle. also, the Chart on the index.html page gives the current reading from the ADC once every 5 seconds.